
mechanistic interpretability is mainly reverse engineering a trained DL model to peek into what it’s looking at in order to perform the task in hand
Github Repo: Tickling-Vision-Models
core concepts:
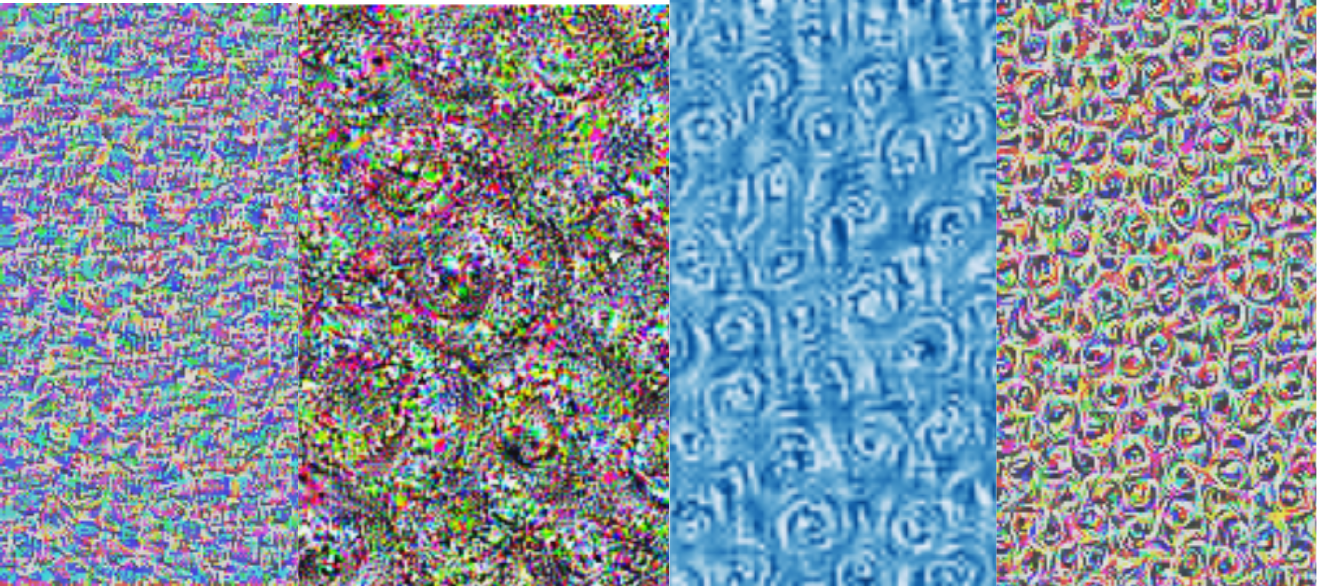
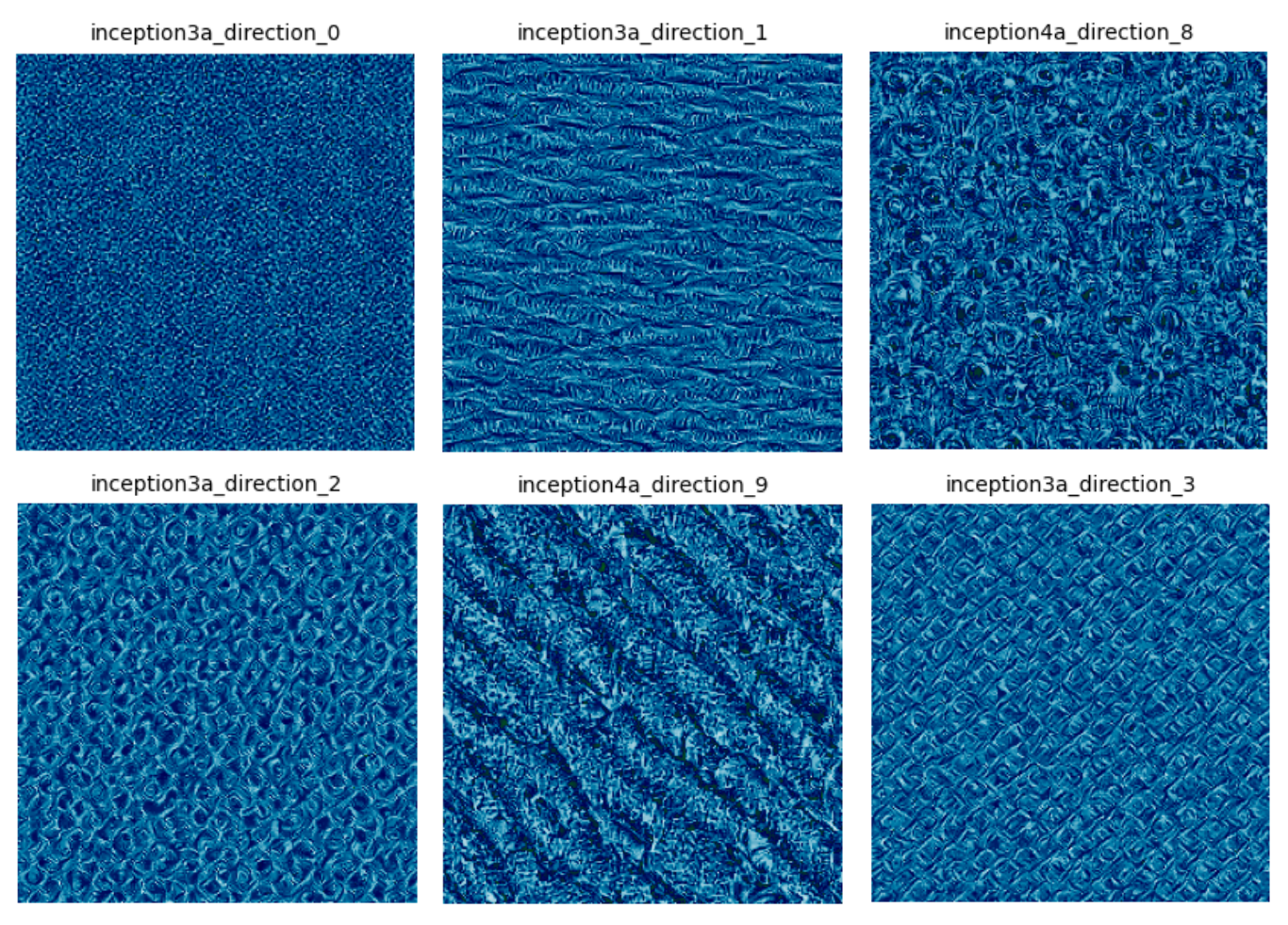
feature visualization (activation maximization)
using Gradient Ascent to identify images / samples that maximize a selected circuit (: neuron/ conv channel/ layer/ …)
where R(x) is a regularization term could be:
…
Linear Probing
train a linear classifier on activations to get an intuition of manifold shape: learned representation
SAE decomposition
learning a disentangle latent representation by encouraging sparsity in a lower manifold
Feature Manifold & Geometry
manifold cluster based on feature : subset of points sharing
local dimension via PCA:
curvature: flat manifold → smooth travel on surface
curved manifold → bumpy ride
(a short step might jump to a semantically different region)
components
: how to measure lengths & angles in a curved manifold
Geodesic distance: walking on the manifold
Euclidian distance: walking in a straight path (through the manifold)
connectedness: all x containing F reachable through a smooth shift / interpolation
test: interpolation effect on classification / feature identification & activation
Adversarial Examples (FGSM & PGD) & mechanistic view
adversarial perturbation introduces a change in activation space: that can be decomposed using an SAE ⇒ determine hijacked circuits by learning the sparse representation
Adversarial Path:
An adversarial path is a continuous trajectory through input space (or representation space) that starts at one label and ends at another, while staying imperceptible or minimally different to a human observer.
formal definition:
clustering Activation atlases:
looking for fractures as multi-cluster concepts
Circuit analysis techniques:
ablation:
circuit silence downstream effect
patching:
replacing a subset of activations for target images from a donor image
feature visualization in learned sparse representation
Metrics:
probe accuracy vs chance baseline
reconstruction loss: MSE on SAE
adversarial success rate
effect size in ablation/patching
clustering purity
to check
GIG (PFVs, ERFs)
causal tracing (BLIP)
TCAV: Testing with Concept Activation Vectors
drawing a linear decision boundary in latent space of a selected layer of the model / network separating samples with feature F from samples without it
CAV formally:
given : logits for class i, c: concept, l: layer
how V is aligned with the mentioned gradient reflect the concept contribution / correspondence to that class
Integrated Gradient
let be a baseline input (mean / zero image)
Layer Integrated Gradient
let
Generalized Integrated Gradient
let be a smooth path
Discretized Integrated Gradient:
GIG using a discrete path (?): common in NLP
Concept localization in hidden layers
CAV projected IG score per layer
TCAV: sign consistency of batch of samples
concepts vs layers heatmap / matrix
Concept Flow throughout the network
concept score through layers:
PFV: Pointwise Feature Vector
CAV per spatial point, no GAP
Dimensionality Reduction x High Dimensions projection (intrinsic dims extraction):
(to elaborate on/ note)
PCA
ICA
KPCA
t-SNE
UMAP